近日,香港城市大学教授于欣格团队给机器人披上了会痛的皮肤,他们研发出一款名为 NRE-skin 的神经形态机器人电子皮肤,可以像人类皮肤一样感受触觉,还能主动感知疼痛和受伤,让机器人拥有接近人类的感知能力和自我保护能力。
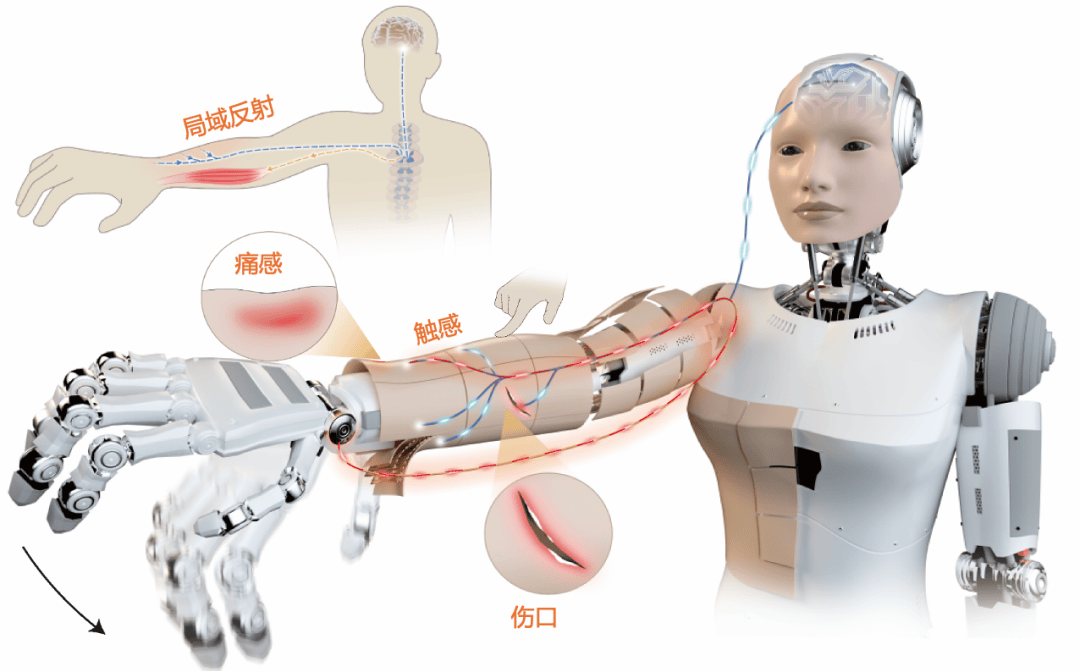
他们把 NRE-skin 安装在一个仿人机器人上进行演示。当被轻轻触摸时,机器人的脸会露出微笑;当压力增大到不适程度时,它会露出苦恼的表情;当压力超过痛苦阈值,它的手臂皮肤会立刻触发痛觉反射动作,同时脸上呈现出痛苦表情,完美模拟了人类的触觉-反射链条。
论文第一作者高育育博士告诉 DeepTech:“我们希望机器人触觉感知能力的提升能够极大增强它的交互能力,使其在走入家庭后在执行诸如做家务、照顾老人、陪伴小孩时等与人类近距离交互的任务时更加安全和灵敏,从而友好地服务于人类。”
(来源:
https://www.pnas.org/doi/10.1073/pnas.2520922122)
让机器人受伤时会喊疼
据了解,这项技术最亮眼的地方在于让机器人拥有了痛觉感知和损伤感知。
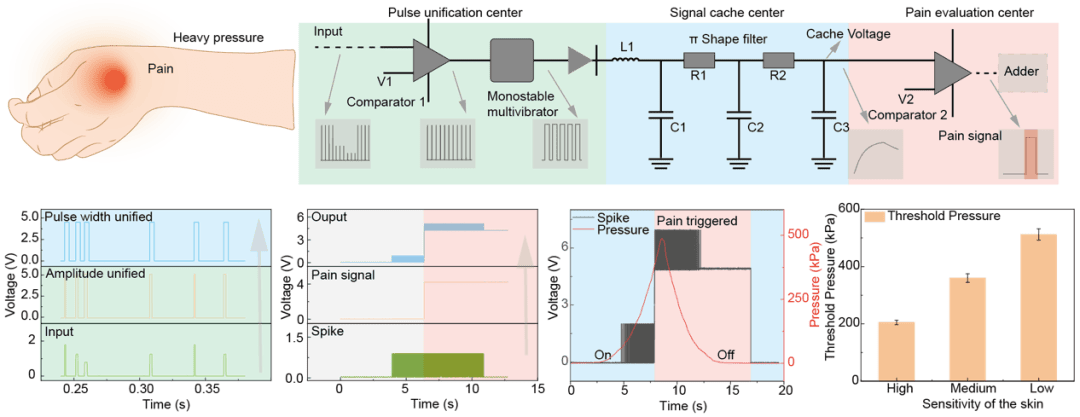
在 NRE-skin 中,于欣格团队设计了一个疼痛中心。当外部对皮肤施加过大的机械刺激时,皮肤的类神经架构会将刺激转化为脉冲并且持续积累,当累积超越设定阈值,即相当于人类感知疼的界限,痛觉信号就会被触发,NRE-skin 会发出一个强烈的疼痛信号。
这个疼痛信号拥有最高优先级。它不会像普通触摸信号一样慢慢传递到机器人的大脑也就是主处理器去分析,而是像人类的反射弧一样直接抄近路送到机器人的肌肉也就是局域电机控制器里。于是,机器人会在毫秒级的时间内做出缩手和躲避等保护性动作,完全无需中央程序干预。之后,中央处理器才会接收到疼过了的通知,让机器人做出相应的表情比如痛苦脸和后续行为等。
此外,也可以调节这块皮肤的敏感度。对于机器人需要精细操作的手指部分,可以设置得敏感些也就是痛苦阈值较低;而对于躯干等不那么脆弱的部位,可以设置得皮实些也就是痛苦阈值高。
人的皮肤划伤了,我们会持续持续感到疼痛,从而知道哪里需要保护。机器人皮肤被割坏怎么办?对于传统电子皮肤来说,它们可能已经“死”了却无法自知。
NRE-skin 则有一个巧妙的自我检查功能。在每个传感器内部,都设有一个生命电阻。在正常情况下,即使没有外部触摸,它也会每隔几十秒产生一个生命脉冲,就像心跳一样告诉系统自己还活着以及功能依然正常。
而一旦皮肤某处被严重割伤或损坏,那里的电路就会断裂,生命脉冲也会随之消失。系统内置的计时器在超过一定时间比如 300 秒没有收到某个点的心跳后,就会判断这一点处于受伤状态,并持续发送损伤信号的报警。这样一来,机器人立刻就能知道自己的皮肤被划伤了,并提醒人类进行维护。
(来源:
https://www.pnas.org/doi/10.1073/pnas.2520922122)
给机器人装上活皮肤,一摸就知位置,还能快速修复
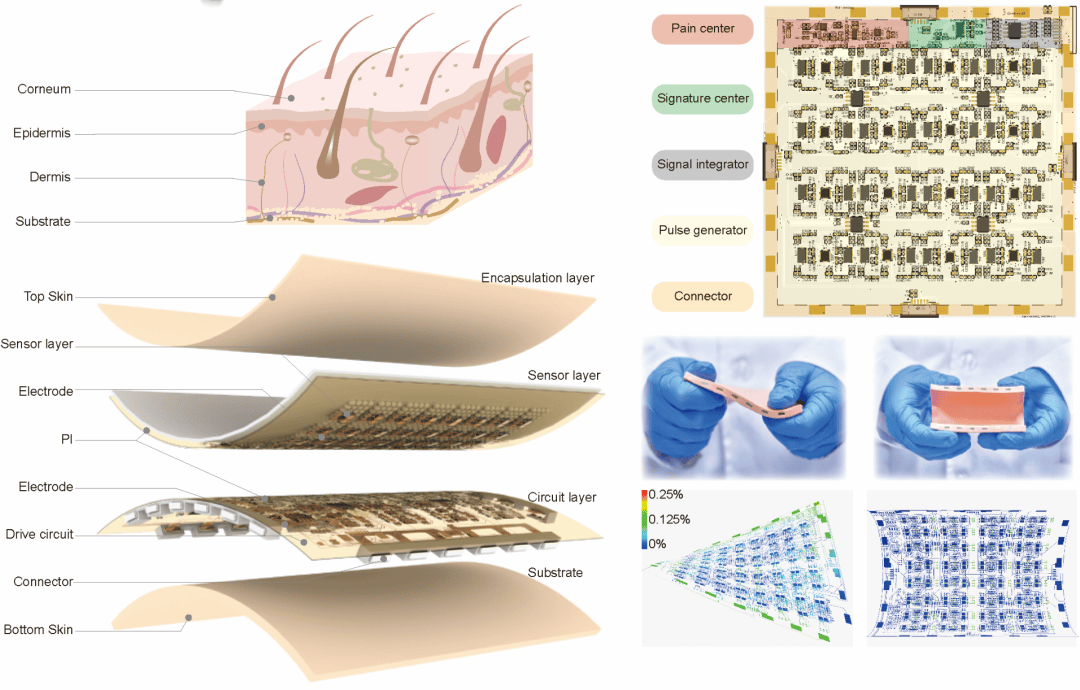
NRE-skin 的核心灵感来自于人类自身的皮肤和神经系统。它不再只是被动地传送信号,而是模仿了人类神经末梢主动产生脉冲信号的方式。皮肤上每一个微型压力传感器都连接一个脉冲发生器,当受到按压的时候,就会产生一连串电脉冲,按得越重、脉冲频率就越高。
这块皮肤拥有一套三层密码系统,能够精确地告诉机器人哪里被触摸到了。它被划分成为许多小格子也就是像素点。于欣格团队为每个点的信号设计了三种可以调节的特征:脉冲形状、脉冲宽度和脉冲高度。
在第一层里,整块皮肤会被分为几个大区比如左上和右上等。每个大区的信号脉冲形状不一样,有的是尖峰状,有的是圆顶状。系统一看到脉冲形状,就知道刺激发生在了哪个大区。
在第二层里,在每个大区内部,再被分成几个小区。不同小区的脉冲信号宽度不同,有的短促只有 1 毫秒,有的稍长大约为 1.5 毫秒。
在第三层里,在每个小区内的每个独立像素点,都被赋予了一个独特的脉冲高度比如 0.5 伏。
通过这样从粗到细的三层密码解码,机器人瞬间就能知道到底是哪一个具体的小点被触摸了。而且,所有信号最后可以合并到一条通道里输出,让大面积铺设皮肤成为可能。

(来源:
https://www.pnas.org/doi/10.1073/pnas.2520922122)
机器人如果磨损或损坏皮肤,也能像换手机壳一样快速更换。NRE-skin 采用了磁性快拆接口设计。每块皮肤模块的边缘都装有微型磁铁和电极。当需要更换的时候,只需要把损坏的那片轻轻撕下,然后将一片完好的新皮肤靠磁力吸上去,电路和机械连接就自动完成了。新皮肤接上之后,会先进行一轮自我检查,确认所有像素单元正常之后,便会立马投入工作。
此外,每块皮肤还有自己独特的身份 ID 信息也就是高频特征峰,当多块皮肤拼接成为一个大面积皮肤的时候,中央处理器可以清晰地区分信号来自于哪一块,从而可以实现无缝协同工作。
图 | 从左到右:于欣格、高育育(来源:受访者)
高育育表示,本次研究始于对两个核心问题的关注。
首先,在人口老龄化导致劳动力短缺的背景下,机器人进入家庭提供协助是必然趋势,但现有机器人普遍缺乏触觉感知能力,在与人交互时容易因不知轻重而造成伤害。因此,赋予机器人触觉能力是首要前提。
其次,仅具备基础触觉还不够,机器人还需要拥有痛觉和伤口感知能力,以实现与人的共情。例如,机器人虽能拿起高温或尖锐物品,但必须理解这些物品对人可能构成的危险,才能以安全、友好的方式递交给人类。只有机器人自身具备伤害感知能力,才能从人的视角出发思考交互过程。

(来源:
https://www.pnas.org/doi/10.1073/pnas.2520922122)
他继续说道:“研究过程中,一个让我印象深刻的挑战是电子皮肤阵列化带来的连线复杂性问题。阵列越多、连线越庞杂,后端理线也会极其麻烦。”
在探寻解决方案时,他深入了解了生物学知识,惊叹于人体皮下神经连接的精妙与高效。人体皮肤末梢的神经分支通过树状结构层层级联,在每一个节点对信号进行预处理,最终仅通过寥寥几根主要的传入神经就将信息传递到大脑。
这种高效、精简的结构给了高育育极大的启发,促使他决心完全模拟这一传递流程。正是受此启发,才设计出仅用六个接口就能实现皮肤模块扩展与拼接的方案。
高育育表示,采用类神经脉冲进行触觉传输并非首次,但关注机器人的痛觉能力属于较早的探索。当前普遍观念认为机器人应无所畏惧,因此较少关注其是否需要痛觉。而在主动伤口识别方面,据高育育所知,本研究应是首个专注于该方向的工作。
(来源:
https://www.pnas.org/doi/10.1073/pnas.2520922122)
“皮肤作为人体最大的器官,也将是机器人最重要的器官之一,赋予其拟人化的触觉与感知能力是刚需,市场潜力巨大且技术方案尚未形成共识。我希望能在此领域贡献自己的力量,加速机器人获得这些关键能力,从而更好地与人类共存协作。”他最后说道。

